




MATEK - Flight Controller F405 WING V2
Matek
- SKU:
- F405-WING-V2
- Shipping:
- Calculated at Checkout
FC Specifications
MCU: STM32F405RGT6, 168MHz , 1MB Flash
IMU: ICM42688-P
Baro: DPS310
OSD: AT7456E
Blackbox: MicroSD card slot
6x UARTs, 1x Softserial_Tx option(INAV)
10x PWM outputs
2x I2C
3x ADC (VBAT, Current, RSSI)
Built in inverter for SBUS input
USB Type-C(USB2.0)
FC Firmware
ArduPilot: MatekF405-Wing (ArduPlane 4.4 or newer)
INAV: MATEKF405SE (INAV 6.0 or newer)
PDB
Input voltage range: 9~30V (3~6S LiPo) w/TVS protection
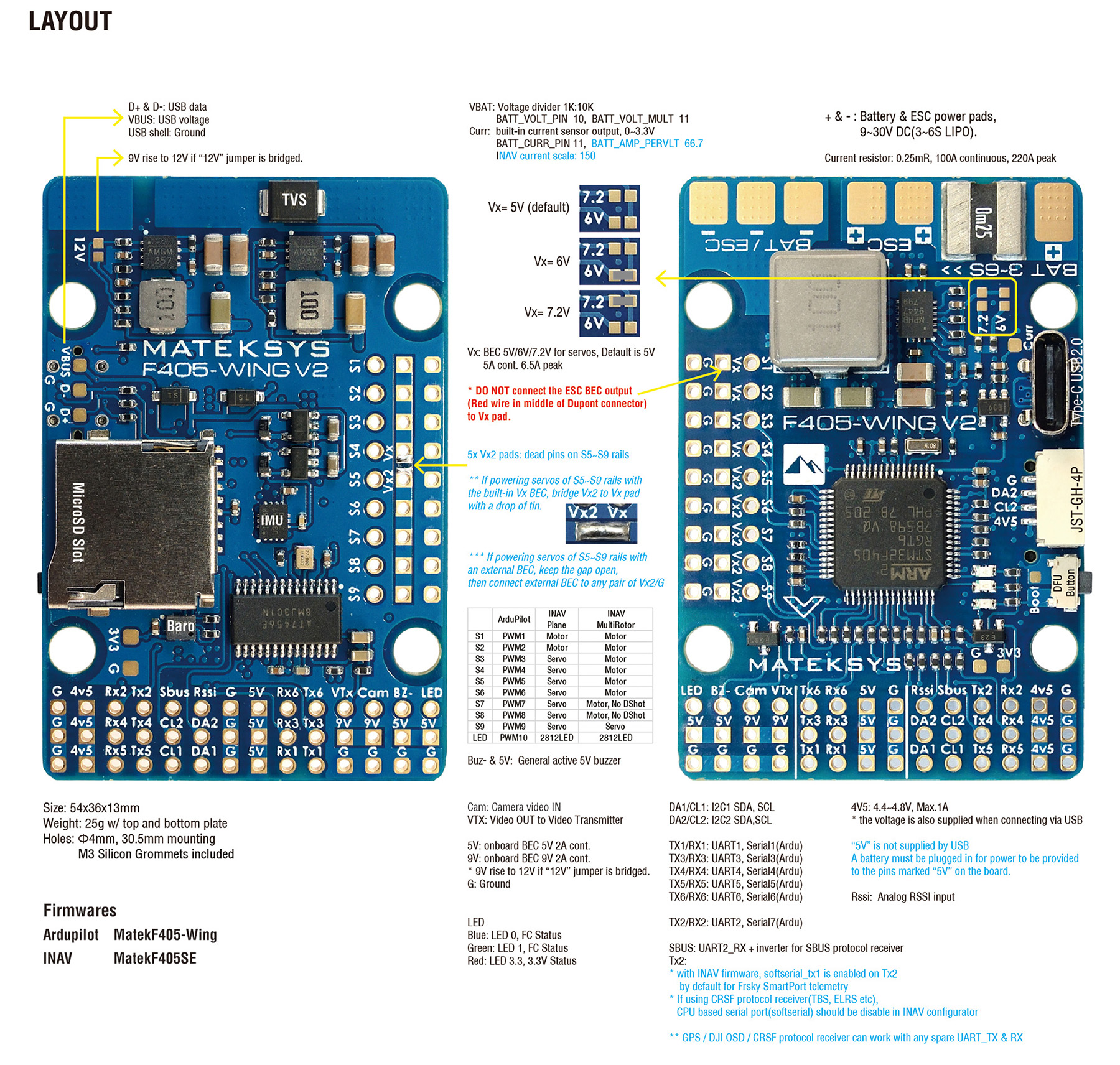
Current Senor: 220A, 3.3V ADC (INAV scale 150, ArduPilot 66.7A/V)
Sense resistor: 100A continuous, 220A peak
Battery Voltage divider 1K:10K (Scale 1100 in INAV, BATT_VOLT_MULT 11.0 in ArduPilot)
BEC 5V output
Designed for Flight controller, Receiver, OSD, Camera, Buzzer, 2812 LED_Strip, Buzzer, GPS module, AirSpeed
Continuous current: 2 Amps
BEC 9V /12V output
Designed for Video Transmitter, Camera, Gimbal ect.
Continuous current: 2 Amps
12V option with Jumper pad
for stable 9V/12V output, input voltage should > output voltage +1V
BEC Vx output
Designed for Servos
Voltage adjustable, 5V Default, 6V or 7.2V options
Continuous current: 5 Amps, 6A Peak
for stable Vx output, input voltage should > Vx voltage +1V
BEC 3.3V output
Designed for external 3.3V peripherals
Linear Regulator
Continuous current: 200mA
Physical
Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
Dimensions: 54 x 36 x 13 mm
Weight: 25g
Including
1x F405-Wing-V2
1x 20cm JST-GH-4P to JST-GH-4P cable for I2C port
Dupont 2.54 pins (Board is shipped unsoldered)
INAV Tips:
- INAV firmware “MATEKF405SE” must be 6.0.0 or newer version.
- Current sensor scale 150
- 5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
- Softserial_tx1 is enabled on Tx2 pad by default for Frsky SmartPort telemetry. If using CRSF protocol receiver(TBS, ELRS etc), CPU based serial port(softserial) should be disable in INAV configurator.
- GPS / DJI OSD and other digital video systems / CRSF protocol receiver can work with any spare UART_TX & RX.
- Airspeed sensor MS4525 works on I2C2 bus only.
| INAV | INAV MultiRotor | INAV Plane | |||
| PWM | S1 | 5 V tolerant I/O | TIM4_CH2 | Motor | Motor |
| S2 | 5 V tolerant I/O | TIM4_CH1 | Motor | Motor | |
| S3 | 5 V tolerant I/O | TIM3_CH3 | Motor | Servo | |
| S4 | 5 V tolerant I/O | TIM3_CH4 | Motor | Servo | |
| S5 | 5 V tolerant I/O | TIM8_CH3 | Motor | Servo | |
| S6 | 5 V tolerant I/O | TIM8_CH4 | Motor | Servo | |
| S7 | 5 V tolerant I/O | TIM12_CH1 | Motor, No DShot | Servo | |
| S8 | 5 V tolerant I/O | TIM12_CH2 | Motor, No DShot | Servo | |
| S9 | 5 V tolerant I/O | TIM1_CH1 | Servo | Servo | |
| LED | 5 V tolerant I/O | TIM2_CH1 | 2812LED | 2812LED | |
| ADC | Vbat ADC | 0~30V | ADC_CHANNEL_1 | scale 1100 | |
| current ADC | 0~3.3V | ADC_CHANNEL_2 | scale 150 (220A) | ||
| RSSI pad | 0~3.3V | ADC_CHANNEL_3 | Analog RSSI | ||
| I2C | I2C1 DA1, CL1 |
5V tolerant I/O | onboard Baro DPS310, Address 0x76 | ||
| OLED 0.96″ | |||||
| I2C2 DA2, CL2 |
5V tolerant I/O | I2C Magnetometer, Rangefinder, Temperature sensor | |||
| Digital Airspeed sensor MS4525 | |||||
| UART 5V tolerant I/O |
USB | USB | |||
| TX1 RX1 | 5V tolerant I/O | UART1 | USER | ||
| TX3 RX3 | UART3 | USER | |||
| TX4 RX4 | UART4 | USER | |||
| TX5 RX5 | UART5 | USER | |||
| TX6 RX6 | UART6 | USER | |||
| TX2 RX2 SBUS |
5V tolerant I/O | UART2 | RC input/Receiver | ||
| Sbus pad | for SBUS receiver, Sbus pad = RX2+inverter | ||||
| RX2 pad | IBUS/DSM | ||||
| TX2 & RX2 | CRSF | disable Softserial_Tx1 | |||
| TX2 pad | uninverted FPort (hacked) | disable Softserial_Tx1 | |||
| TX2 pad | SRXL2 | disable Softserial_Tx1 | |||
| TX2 pad | SmartPort Telemetry | enable Softserial_Tx1 | |||
ArduPilot Tips:
- ArduPlane firmware “MatekF405-WING” must be 4.4.0 or newer version.
- BATT_AMP_PERVLT 66.7
- Use 5V active buzzer on “Buz-” and 5V pads, Tone alarm is not supported.
- 5x Vx2 pads on S5~S9 rails are dead pins, If powering servos of S5~S9 rails with the built-in Vx BEC, bridge Vx2 to Vx pad with a drop of tin. If powering servos of S5~S9 rails with an external BEC, keep the gap open, you may connect external BEC to any pair of Vx2/G.
- non-inverted (hacked) S.Port signal is required for FPort or Smartport telemetry.
- If sending highspeed serial data (eg. 921600 baud) to the board, use USART1(Serial1) .
| ArduPilot | |||||
| PWM 5V tolerant I/O |
S1 | PWM1 GPIO50 | TIM4_CH2 | DMA/DShot | Group1 |
| S2 | PWM2 GPIO51 | TIM4_CH1 | DMA/DShot | ||
| S3 | PWM3 GPIO52 | TIM3_CH3 | DMA/DShot | Group2 | |
| S4 | PWM4 GPIO53 | TIM3_CH4 | DMA/DShot | ||
| S5 | PWM5 GPIO54 | TIM8_CH3 | DMA/DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | TIM8_CH4 | DMA/DShot | ||
| S7 | PWM7 GPIO56 | TIM1_CH2N | DMA/DShot | Gourp4 | |
| S8 | PWM8 GPIO57 | TIM1_CH3N | DMA/DShot | ||
| S9 | PWM9 GPIO58 | TIM1_CH1 | DMA/DShot | ||
| LED pad | PWM10 GPIO59 | TIM2_CH1 | DMA/DShot | Gourp5 | |
| SERVO10_FUNCTION 120, NTF_LED_TYPES neopixel | |||||
| Mixing Dshot and normal PWM operation for outputs is restricted into groups, ie. enabling Dshot for an output in a group requires that ALL outputs in that group be configured and used as Dshot, rather than PWM outputs. If servo and motor are mixed in same group, make sure this group run lowest PWM frequency according to the servo specification. ie. Servo supports Max. 50Hz, ESC must run at 50Hz in this group. |
|||||
| ADC | Vbat ADC | onboard battery voltage | 1K:10K divider, 0~30V | BATT_MONITOR BATT_VOLT_PIN BATT_VOLT_MULT |
4 10 11.0 |
| current ADC | onboard current sense | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 66.7 |
|
| RSSI ADC | Analog RSSI | 0~3.3V | RSSI_ANA_PIN RSSI_TYPE |
15 2 |
|
| I2C | I2C1 DA1, CL1 |
5V tolerant I/O | onboard Baro DPS310 | Address | 0x76 |
| Digital Airspeed I2C | ARSPD_BUS | 0 | |||
| I2C2 DA2, CL2 |
5V tolerant I/O | Magnetometer | COMPASS_AUTODEC | 1 | |
| Digital Airspeed I2C | ARSPD_BUS | 1 | |||
| UART 5V tolerant I/O |
USB | USB | console | SERIAL0 | |
| TX1 RX1 | USART1 | with DMA | telem1 | SERIAL1 | |
| TX3 RX3 | USART3 | NO DMA | GPS1 | SERIAL3 | |
| TX4 RX4 | UART4 | NO DMA | GPS2 | SERIAL4 | |
| TX5 RX5 | UART5 | NO DMA | USER | SERIAL5 | |
| TX6 RX6 | USART6 | NO DMA | USER | SERIAL6 | |
| TX2 RX2 SBUS |
USART2 | NO DMA | RC input/Receiver | SERIAL7 | |
| RX2 | IBUS/DSM | BRD_ALT_CONFIG 0 Default |
|||
| Sbus pad | SBUS | ||||
| TX2 & RX2 | CRSF | BRD_ALT_CONFIG 1 SERIAL7_PROTOCOL 23 |
SERIAL7_OPTIONS 0 | ||
| TX2 | uninverted FPort (hacked) | SERIAL7_OPTIONS 4 | |||
| TX2 | SRXL2 | SERIAL7_OPTIONS 4 | |||
Returns Policy
You may return most new, unopened items within 30 days of delivery for a full refund. We'll also pay the return shipping costs if the return is a result of our error (you received an incorrect or defective item, etc.).
You should expect to receive your refund within four weeks of giving your package to the return shipper, however, in many cases you will receive a refund more quickly. This time period includes the transit time for us to receive your return from the shipper (5 to 10 business days), the time it takes us to process your return once we receive it (3 to 5 business days), and the time it takes your bank to process our refund request (5 to 10 business days).
If you need to return an item, simply login to your account, view the order using the "Complete Orders" link under the My Account menu and click the Return Item(s) button. We'll notify you via e-mail of your refund once we've received and processed the returned item.
Shipping
We can ship to virtually any address in the world. Note that there are restrictions on some products, and some products cannot be shipped to international destinations.
When you place an order, we will estimate shipping and delivery dates for you based on the availability of your items and the shipping options you choose. Depending on the shipping provider you choose, shipping date estimates may appear on the shipping quotes page.
Please also note that the shipping rates for many items we sell are weight-based. The weight of any such item can be found on its detail page. To reflect the policies of the shipping companies we use, all weights will be rounded up to the next full pound.
Related Products

Matek
MATEK - Flight Controller F405 WMN
MATEK - Flight Controller F405 WMN F405-WMN Quick Start Guide PDF FIRMWARE FC SpecificationsMCU: STM32F405RGT6, 168MHz , 1MB FlashIMU: ICM42688-PBaro: SPL06-001OSD: AT7456E

Matek
MATEK - Flight Controller F405-WTE
FC Specifications MCU: STM32F405RGT6, 168MHz , 1MB FlashIMU: ICM42688-PBaro: SPL06-001OSD: AT7456EBlackbox: MicroSD card slotESP WiFi Telemetry(MAVLink, 14dBm)ExpressLRS 2.4G receiver(CRSF protocol,...

Matek
MATEK - Flight Controller H743-WING V3
FC Specifications MCU: STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash IMU: ICM42688-P(V3)+ICM42605 Baro: Infineon DPS310 (I2C2) OSD: AT7456E (SPI2) Blackbox: MicroSD card slot (SDIO) 7x Uarts...

Matek
MATEK - Flight Controller F411-WTE
Since Mar.2023, the IMU BMI270 has been replaced with ICM42688P. Pls check out the label on the plastic bag. ICM42688P version is supported by INAV 6.0 or newer. If you stick with old...

Matek
MATEK - FLIGHT CONTROLLER H743-MINI V3
FC Specifications MCU: STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash Board V3 IMU: ICM42688-P (SPI1) & ICM42605 (SPI4) Baro: Infineon DPS310 (I2C2) OSD: AT7456E (SPI2) Blackbox: MicroSD card socket...
